
Agility Robotics
Role: Prinicipal Industrial Designer
I joined Agility as the only Industrial Designer at a time where they were already locked into their V4 and going into EVT. In that role I strived to foster an understanding of the ID process and support the engineering team in solving problems as they arose. I worked closely with the Manipulation team to develop end effectors that were functional and provided a solution for the head design, amongst several other efforts.

There came a point where the Perception team required an additional camera on the front of the head, so this provided an opportunity to address not only the lack of serviceability but also form concerns that I had upon joining. I also pushed to upgrade to a modern interface and prototyped this collaboratively with ENG.




The head surfacing was poorly executed from the onset so I worked with our design engineer to provide an analysis we could present to ENG. This was show to show the form would be problematic to injection mold.. We then worked on better camera placement and improved overall surfacing.




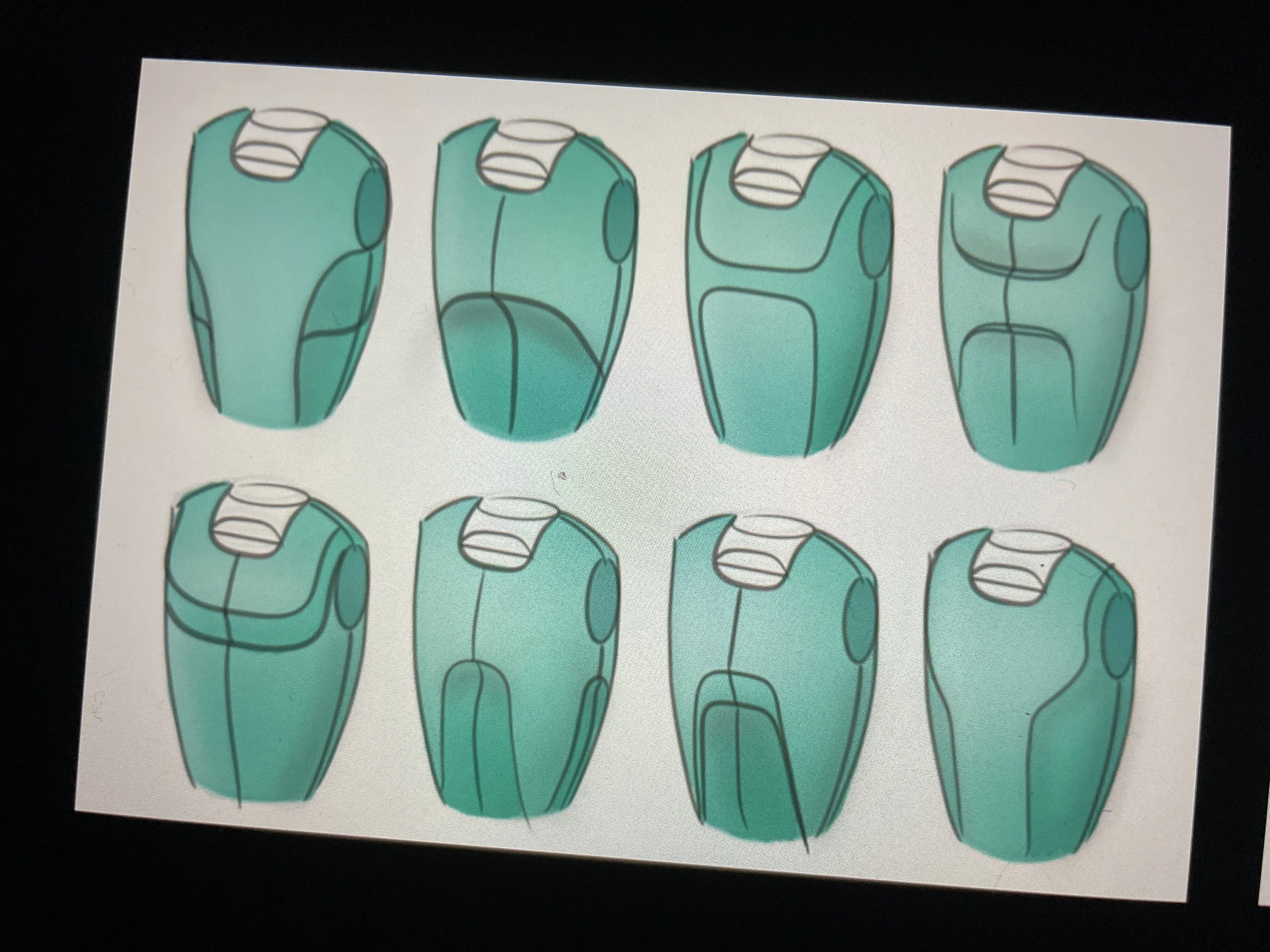
There was also the need for “bumpers” on the front chest as the head would hit the ground upon falling and break off. This created an opportunity to concept on having impact areas or even crush zones into the torso form itself.
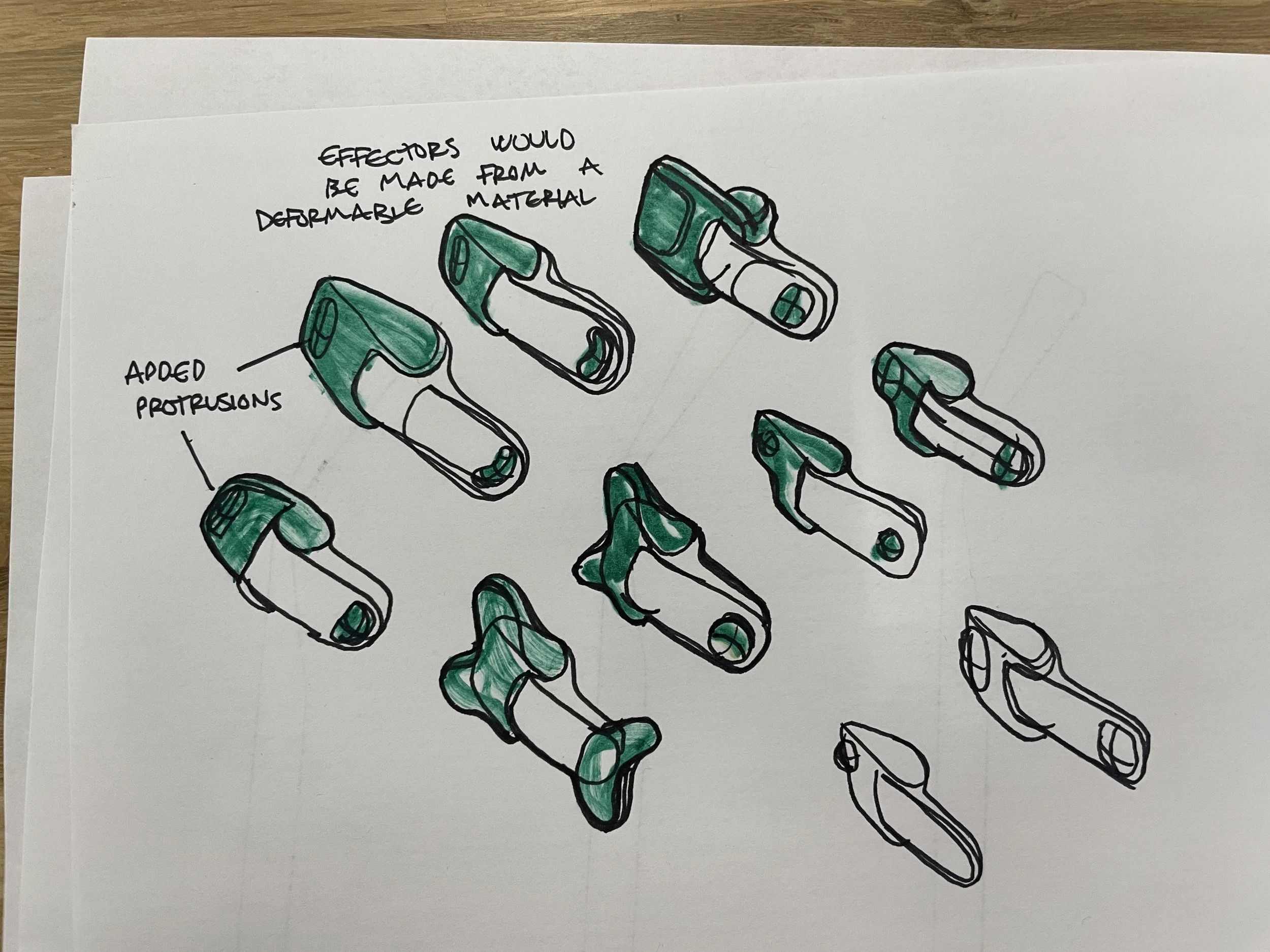
I reached out to the Manipulation team as I learned they were having problems and was able to generate some concepts to help them with tote carry. I was very limited in what I could concept as their approach was not that of a robotic hand, but the constraint of a lever that relied on a single actuator. I had concepts 3D printed at different durometers based on discussions with the Lead Manipulation Engineer.



We also saw through walking failure that the robot was extremely cumbersome to handle given the weight. There was already a strut anchor at the top of the lower leg which was modified into a handle of sorts.


Charger design was constrained by time, but I did review with the appropriate stakeholders that self charging would be possible and confirmed it with ENG. I pushed hard for self-charging as a feature and drove that idea home with the C-Suite. ENG was able to successfully execute it as a script. The idea here then was that the charger would be simple and extensible for a fleet.

